
The potential of the helicopter for submarine detection had been demonstrated in 1946. During the next four years sonar underwent major modifications which resulted in improved reliability and maintainability. To make it more compact the Navy contracted for the development and manufacture of a lightweight dipping- sonar especially designed for helicopters. The result was the AN/AQS-4.
On January 19, 1951, LT Stewart Graham, who had been instrumental in the initial dipping sonar tests, was permanently transferred to The US Navy Rotary Wing Desk for assignment to the Naval Air Development Squadron (VX-1) in Key West, Florida to evaluate the new AN/AQS-4 as installed in an HO4S helicopter. Dr. Coop, who was the development engineer, was assigned as the radar operator. An LST was used as a helicopter operating platform in the Gulf of Mexico; a submarine was used as the sonar target; a destroyer was used as the project control station; and two smaller vessels were used for underwater sound measurements. Daily exercises took place with encouraging results. So much so, the Navy wanted to continue the program on a higher level utilizing additional personnel and helicopters.
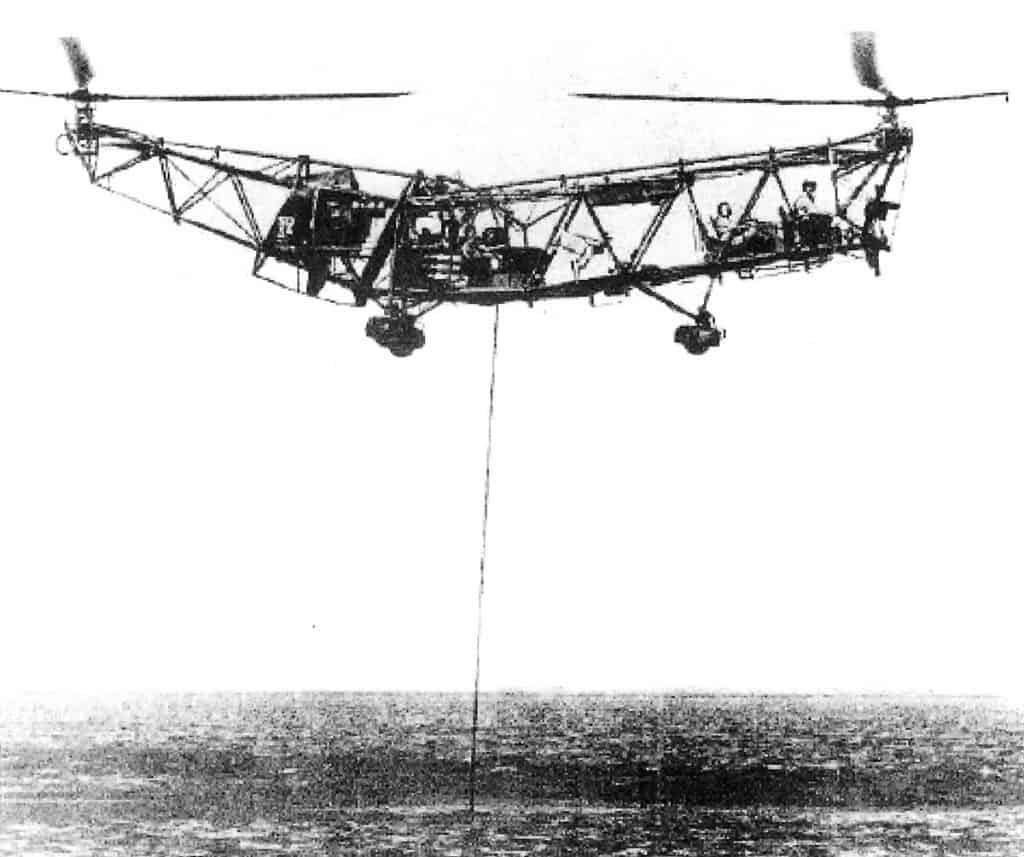
HUP-1 and HRP helicopters were utilized in addition to the initial HO4S. The HUP-1 incurred sound resonance problems and was eliminated from consideration. The HRP, in the Key West environment, proved to be heavy and the engines overheated during prolonged hovers in the high heat and humidity. In order to reduce weight the fabric was stripped from the helicopter’s tubular structure. This weight reduction enabled the HRP-1 to provide satisfactory performance, even under adverse conditions, but gave rise to the problem of corrosion and breaking down of the electrical equipment and wiring. As a result the Navy continued the tests using HO4S-1 helicopters that were being evaluated at the time. It did not take long before the HO4S-1s, equipped with the 550 hp R-1340 engines, also ran into troubles due to prolonged hovering under no-wind conditions in the high heat and humidity environment. VX-1 came to the conclusion that the stripped down HRPs performed better than any other helicopter then available and the HRP was used for the evaluation program. The HO4S-1s were used for student indoctrination.
The program grew to 10 HRPs. The aircraft carrier Siboney and a captured U-21 German submarine capable of underwater speed of up to 20 knots
were added to the group. Each Day all mechanical and electronic components used in the dipping sonar tests of simulated wartime operations were evaluated. One phase of the program tested a search and attack helicopter. It carried the dipping sonar to locate the submarine and a torpedo to attack a submerged submarine. The number of sonar dips needed to detect and locate a submerged submarine for the purpose of closing the range to launch a satisfactory torpedo attack was evaluated. This was later developed into the hunter-killer helicopter ASW concept wherein one helicopter detected and located the submarine and a second made the attack in a coordinated maneuver. Another phase was to determine the capabilities of a radar equipped surface vessel to tactically control a number of ASW helicopters to cover a given area. From this was developed data referred to as “probability of detection vs range.”
The helicopter ASW program expanded beyond US waters in 1952, when the Cuban Naval Air Station at Puerto Mariel hosted units of the US Naval Operations Development force. The force included the Submarine USS Amberjack, Escort Patrol Craft 1431, LST 209 and five HRPs. On February 18, 1952, the Key West Detachment was transferred to Cuba and exercises were conducted daily for purpose of deep water echo-ranging. This continued until mid March when a Cuban military uprising forced the detachment to leave Cuba. Evaluations resumed from Key West and by the end of August 1952, the Navy accepted the AN/AQS-4 helicopter sonar package and the first and second Navy ASW helicopter squadrons, HS-1 and HS-2, were formed
In September 1952 Graham, promoted to LCDR August 5 1951, was transferred to the U. S. Naval Air Test Center at Patuxent River, Maryland and reported to the Naval Air Tactical Test Division Center as head of the Rotary Wing Section of the Tactical Test Division. It was here that LCDR Graham received newly procured Navy helicopters and evaluated them for what they were designed for. This included SAR; Troop Transport; Aircraft Carrier Operations; Instrument Flight; Observation; Cargo Sling and Sonar Installation Adaptability.
Since the stripped down HRPs had been the most successful of the project aircraft the Navy favored the tandem rotor configuration. The helicopter of choice was the Bell XHSL-1. This was an interconnected, two-blade, tandem rotor design. To address previous power plant limitations the XHSL-1 was equipped with a 2400hp R-1820-50 engine. It had a 425 gallon fuel capacity which provided a flight endurance of four hours. It also had a Bell developed autopilot designed to permit hovering for long periods. The HSL experienced development problems, however, and the Piasecki HUP-2 was used as a less than satisfactory substitute. The main problem with the HUP was the 525 hp Continental Engine. The Sikorsky HSS-1 (H-34) was later developed and became the ASW helicopter of the fleet.
During September of 1953 LCDR Graham was returned for assignment to Coast Guard operational duties.